จัดทำโดย
นายณฐกร โชติบุตร แผนกเมคคาทรอนิกส์ วิทยาลัยเทคนิคสมุทรสาคร


ทำการโหลดโปรเเกรม openscad







เเล้วทำการติดตั้งโปรเเกรมให้เรียบร้อย
ทำการเปิดลิ้งhttps://www.thingiverse.com/thing:16627

ทำการ Download ให้เรียบร้อย เเล้วเเตกไฟล์
เปิดโปรเเกรม openscad

กด Open เเล้วเลือกไฟล์ที่ได้ทำการ Download เเล้วเลือก files
เเล้วเปิด Pulley_T-MXL-XL-HTD-GT2_N-tooth
เเล้วจะได้หน้าต่างเเบบนี้มา

เราสามารถเเก้ไขขนาดของเฟืองได้ เเล้วก็เปลี่ยนขนาดตามที่เราต้องการ

เเล้วก็ยีงสามารถเปลี่ยนรุ่นตามที่เราต้องการ

เปลี่ยนค่าเลขตามที่เราจะสร้าง
1=MXL 6=T5 11=HTD_8mm
2=40DP 7=T10 12=GT2_2mm
3=XL 8=AT5 13=GT2_3mm
4=H 9=HTD_3mm 14=GT2_5mm
5=T2.5 10=HTD_5mm
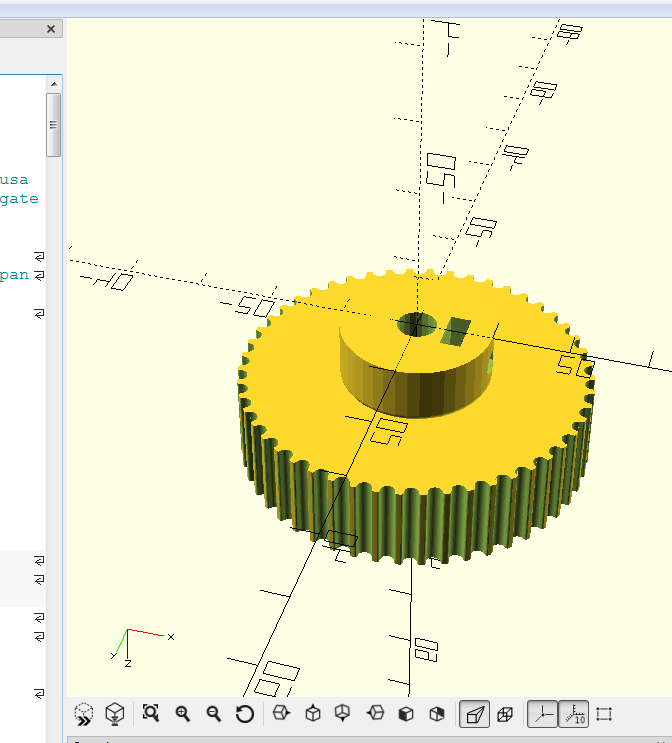
พอเลือกเสร็จเเล้วให้กด


ก็จะได้เเบบ 3D ที่เราต้องการ

ความคิดเห็น
แสดงความคิดเห็น