
ลอจิกเกต (LOGIC GATE)
ลอจิกเกต หรือ ประตูสัญญาณตรรกะ เป็นตัวดำเนินการทางตรรกศาสตร์ซึ่งรับข้อมูลเข้าอย่างน้อยหนึ่งตัว มาคำนวณและส่งข้อมูลออกหนึ่งตัว การทำงานของเกตนิยมเขียนอยู่ในรูปพีชคณิตแบบบูล เมื่อนำเกตต่าง ๆ มาประกอบเป็นวงจรจะได้วงจรตรรกะ ซึ่งเป็นวงจรดิจิทัลประเภทหนึ่ง
เกตนิยมสร้างโดยใช้ไดโอดและทรานซิสเตอร์ในวงจรอิเล็กทรอนิกส์ แต่ก็สามารถสร้างโดยใช้วงจรรีเลย์, แสง หรือกลไกอื่น ๆ ได้ด้วย
เกตพื้นฐาน
เกตพื้นฐานมีทั้งหมด 7 ตัว ได้แก่ OR, AND, NOT, NOR, NAND, XOR และ XNOR เกตที่กล่าวมานี้ไม่ได้เป็นอิสระต่อกัน กล่าวคือเกตบางตัวสามารถสร้างโดยเกตตัวอื่น ๆ ได้ เช่น NOR สามารถสร้างจาก OR ตามด้วย NOT เป็นต้น ในจำนวนเกตพื้นฐานนี้ มีเพียง NAND หรือ NOR ตัวใดตัวหนึ่งก็สามารถสร้างเกตที่เหลือทั้ง 7 ตัวได้ ตัวดำเนินการที่ใส่ไว้เป็นตัวดำเนินการของพีชคณิตแบบบูล
OR gate
เกต OR คือเกตที่ให้สัญญาณขาออกเป็น 0 เมื่อสัญญาณขาเข้าทุกตัวเป็น 0 และจะให้สัญญาณขาออกเป็น 1 เมื่อสัญญาณขาเข้าตัวใดตัวหนึ่งเป็น 1 เป็นความหมายเดียวกับตรรกะ "หรือ" มีตัวดำเนินการคือ + ตารางค่าความจริงของเกต OR เป็นดังนี้

Not gate
Not gate คือเกตที่ให้สัญญาณขาออกเป็นส่วนเติมเต็มของสัญญาณขาเข้า หรือเป็นการสลับค่าของสัญญาณขาเข้า เป็นความหมายเดียวกับตรรกะ "นิเสธ" เกตนี้จะรับสัญญาณขาเข้าเพียงข้างเดียว มีตัวดำเนินการคือ A (อ่านว่า not A หรือ A bar) ตารางค่าความจริงของเกต NOT เป็นดังนี้

and gate
and gate คือเกตที่ให้สัญญาณขาออกเป็น 1 เมื่อสัญญาณขาเข้าทุกตัวเป็น 1 และจะให้สัญญาณขาออกเป็น 0 เมื่อสัญญาณขาเข้าตัวใดตัวหนึ่งเป็น 0 ตารางค่าความจริงของเกต NAND เป็นดังนี้

Nand gate
Nand gate คือเกตที่ให้สัญญาณขาออกเป็น 0 เมื่อสัญญาณขาเข้าทุกตัวเป็น 1 และจะให้สัญญาณขาออกเป็น 1 เมื่อสัญญาณขาเข้าตัวใดตัวหนึ่งเป็น 0 หรือเป็นส่วนเติมเต็มของเกต AND นั่นเอง ตารางค่าความจริงของเกต NAND เป็นดังนี้

NOR gate
NOR gate คือเกตที่ให้สัญญาณขาออกเป็น 1 เมื่อสัญญาณขาเข้าทุกตัวเป็น 0 และจะให้สัญญาณขาออกเป็น 0 เมื่อสัญญาณขาเข้าตัวใดตัวหนึ่งเป็น 1 หรือเป็นส่วนเติมเต็มของเกต OR นั่นเอง ตารางค่าความจริงของเกต NOR เป็นดังนี้

XNOR gate
XNOR gate คือเกตที่ให้สัญญาณขาออกเป็น 0 เมื่อสัญญาณขาเข้าต่างกัน และจะให้สัญญาณขาออกเป็น 1 เมื่อสัญญาณขาเข้าเหมือนกัน หรือเป็นส่วนเติมเต็มของเกต XOR นั่นเอง ซึ่ง
A ⊕ B = (A + B) ·(A + B) = A · B + A · B ตารางค่าความจริงของเกต XNOR เป็นดังนี้

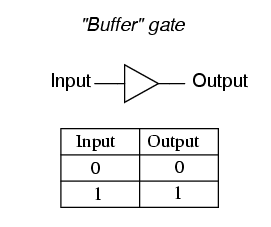
Buffer gate
Buffer gate สามารถนำไปเป็นตัวขับค่าระดับสัญญาณให้มีความแรงยิ่งข้ึน และสามารถนำไปช่วยแก้ปัญหา ที่เกิดจากการหน่วงสัญญาณ (Propagation Delay Time) ตารางค่าความจริงของเกต Buffer gate เป็นดังนี้
ความคิดเห็น
แสดงความคิดเห็น