SERVO MOTOR

Servo Motor เป็นอุปกรณ์ที่สามารถควบคุมเครื่องจักรกล หรือระบบการทํางานนั้นๆ ให้เป็นไปตามความต้องการ เช่น ควบคุมความเร็ว (Speed) , ควบคุมแรงบิด (Torque) , ควบคุมแรงตําแหน่ง (Position) โดยให้ผลลัพธ์ตามความต้องการที่มีความแม่นยําสูง
ประเภทของเซอร์โวมอเตอร์(Servo motor)
โดยทั่วจะมีทั้งดีซีและเอซีเซอร์โว DC Servo Motor มีการใช้เครื่องจักรกลอุตสาหกรรมมากกว่า AC Servo Motor เนื่องจากช่วงที่ผ่านมาการควบคุมกระแสกระแสสูงๆนั้นจะต้องใช้ SCRs แต่ปัจจุบันทรานซิสเตอร์ได้พัฒนาขีดความสามารถให้ตัดต่อกระแสสูงและใช้งานที่ความถี่ได้สูงๆขึ้น จึงทำให้ระบบควบคุมทางเอซีและระบบเซอร์โวได้ถูกนำมาใช้งานมากขึ้น ซึ่งสามารถแยกประเภทของเซอร์โวได้ดังนี้

1. มอเตอร์ชนิดที่มีแปรงถ่าน
เซอร์โวมอเตอร์ชนิดนี้ที่สเตเตอร์จะเป็นแม่เหล็กถาวร ส่วนโรเตอร์ยังใช้แปรงถ่านและคอมมิวเตอร์เรียงกระแสเข้าสู่ขดลวดอาร์เมเจอร์ เหมือนกับดีซีมอเตอร์ทั่วไป
2. เซอร์โวมอเตอร์ชนิดที่ไม่มีแปรงถ่าน
เซอร์โวมอเตอร์ในกลุ่มนี้ประกอบด้วยดีซีเซอร์โว (DC Brushless Servo ่โรเตอร์ทำด้วยแม่เหล็กถาวร) เอซีเซอร์โว (AC Servo) ซึ่งมีทั้งแบบซิงโครนัสเซอร์โว อะซิงโครนัสเซอร์โว (การนำอินดัคชั่นมอเตอร์มาใช้ทำเป็นระบบขับเคลื่อนเซอร์โวมอเตอร์) และ สเตปปิ้งเซอร์โวมอเตอร์
โครงสร้างของเซอร์โวมอเตอร์
ข้อจำกัดอย่างหนึ่งของระบบควบคุมเซอร์โว ก็คือการใช้งานจะต้องเป็นแบบ Closed loop เท่านั้น การใช้งานระบบควบคุมเซอร์โวไม่สามารถเลือกควบคุมเป็นแบบ Open loop ได้เหมือนกันระบบขับเคลื่อนเอซี (AC Drives) การตอบสนองของระบบเซอร์โว เช่น อัตราเร่ง แรงบิด และตำแหน่งที่ควบคุม จะไม่เป็นไปตามวัตถุประสงค์หากไม่มีสัญญาณป้อนกลับไปยังชุดขับเคลื่อนเซอร์โว
การควบคุมการทำงานในระบบนี้อุปกรณ์ป้อนกลับหรือเอ็นโค๊ดเตอร์ (Encoder) จะมีบทบาทความสำคัญอย่างยิ่งเสมือนกับเป็นของคู่กันชนิดที่เรียกว่าขาดซึ่งกันและกันไม่ได้ ในทางปฎิบัติจึงทำเซอร์โวมอเตอร์และเอ็นโค๊ดเตอร์ ถูกออกแบบและผลิตสร้างขึ้นมาคู่กันในลักษณะเป็นแพ็คเกจ (Package ซึ่งมี Encoder ติดอยู่ที่ส่วนท้ายของมอเตอร์ ดังรูป

Gearheads = เกียร์สำหรับลดความเร็วรอบเพื่อเพิ่มแรงบิด
Shafts = เพลาของมอเตอร์
Flanges = หน้าแปลนสำหรับติดตั้งมอเตอร์
Feed back = อุปกร์ป้อนกลับหรือ encoder
Connectorization = ขั้วต่อสายไฟเข้ามอเตอร์ และขั้วต่อสายสำหรับ Encoder
Breakes = ชุดเบรก
โครงสร้างของ AC servo Motor จะคล้ายกับมอเตอร์ 3 เฟสทั่ว ๆ ไป ซึ่งจะประกอบด้วย 2ส่วนที่สำคัญ คือ สเตเตอร์และโรเตอร์ โดยสเตเตอร์จะประกอบด้วยขดลวด 3 ชุด ขดลวดภายในจะต่อเป็นแบบสตาร์ (Star หรือ WYE) และมีสายต่อมาที่ขั้วต่อสายด้านนอก 3 เส้น (จุดนิวทรอลจะอยู่ด้านใน) ส่วนโรเตอร์ทำด้วยแม่เหล็กถาวร (Permanent Magnet) ไม่มีขดลวดพัน,ไม่มีคอมมิวเตเตอร์ และไม่มีแปรงถ่าน (Brushless)
โครงสร้างที่ไม่มีขดลวดพันไม่และแปรงถ่าน จะทำให้ประสิทธิภาพของมอเตอร์สูงขึ้น ไม่มีการสูญเสืยในขดลวดทองแดง ไม่ต้องบำรุงรักษาเนื่องจากแปรงถ่าน ไม่เกิดประกายไฟเนื่องจากการเรียงกระแสจากแปรงถ่านผ่านคอมมิวเตอร์ไปยังขดลวดทองแดงที่พันอยู่ในตัวโรเตอร์
สำหรับวัสดุที่นำมาสร้างแม่เหล็กถาวรนี้จะแตกต่างกันไป โดยขึ้นอยู่กับราคาและเทคโนโลยีของบริษัทผู้ผลิดนั้นๆ ซึ่งมีตั้งแต่ชนิดทีราคาถูกเช่น เซรามิก (เฟอไรต์) จนถึงการใช้วัสดุที่มีราคาแพงอย่างเช่น ซามาเรียม โคบอลต์ หรือ นีโอไดเมียม เป็นต้น (ปัจจุบันเอซีเซอร์โวมอเตอร์ส่วนใหญ่จะใช้วัสดุสารแม่เหล็กแบบ นีโอไดเมียม เนื่องจากมีคุณสมบัติความเป็นแม่เหล็ก และความเหมาะสมเรื่องราคาดีกว่า เมื่อเปรียบเทียบกับวัสดุสารแม่เหล็กแบบอื่นๆ
หลักการทำงานของเซอร์โวมอเตอร์
การทำงานของเซอร์โวมอเตอร์ชนิดนี้จะคล้ายกับการทำงานของซิงโครนัสมอเตอร์ 3 เฟส กล่าวคือเมื่อมีการควบคุมให้คอนโทรลเลอร์จ่ายกระแสไฟฟ้าเข้าไปยังขดลวดที่สเตเตอร์ แกนเหล็กของสเตเตอร์จะกลายเป็นแม่เหล็กไฟฟ้า และหมุนเคลื่อนที่ด้วยความเร็วที่แปรผันตามความถี่ ซึ่งเรียกว่า ความเร็วซิงโครนัส (synchronous speed) หรือความเร็วสนามแม่เหล็กหมุน และจะดูดให้โรเตอร์ซึ่งเป็นแม่เหล็กถาวรหมุนเคลื่อนที่ตาม
จากลักษณะโครงสร้างของโรเตอร์และหลักการทำงานที่เหมือนกับซิงโครนัสมอเตอร์ซึ่งเป็นมอเตอร์แบบเอซี แต่ไม่มีแปรงถ่าน (Brushless) ไม่มีซี่คอมมิวเตอรเตอร์ จึงทำให้มอเตอร์ชนิดนี้มีชื่อเรียกขานแตกต่างกันออกไป เช่น เรียกทับศัพท์ว่า Permanent Magnet Synchronous Motor(PMSM) ซึ่งหมายถึงซิงโครนัสมอเตอร์ที่ไม่มีแปรงถ่าน บ้างก็เรียกว่าเอซีเซอร์โวมอเตอร์ (AC Servo motor) หรือบ้างก็เรียกสั้นๆย่อๆว่า AC Brushless หรือ Brushless Motor เป็นต้น

โครงสร้างของระบบควบคุมเซอร์โวมอเตอร์
ลักษณะของระบบควบคุมเซอร์โวมอเตอร์จะเป็นระบบควบคุมแบบลูปปิด(Closed loop control) ซึ่ง
ประกอบด้วย 3 โหมดการควบคุมคือ โหมดการควบคุมแรงบิด (Torque Control Mode) ซึ่งอยู่วงรอบหรือลูปในสุด โหมดการควบคุมอัตราเร่ง(Velocity Control Mode) และโหมดการควบคุมตำแหน่ง(Position Control Mode) ซึ่งอยู่ลูปด้านนอกสุด โดยมีองค์ประกอบที่สำคัญๆดังรูป

1. เซอร์โวมอเตอร์ (Servo Motor) (ตำแหน่ง 4.2)
2. ชุดควบคุมการขับเคลื่อนเซอร์โว (Servo Drive,Servo Amplifier หรือบ้างก็เรียกว่า servo controller ) (ตำแหน่ง 4.4, 4.5, 4.6)
3. อุปกรณ์ป้อนกลับ (Feedback Device เช่น Speed encoder และ Position Sensor ) (ตำแหน่ง 4.3)
องค์ประกอบในการทำงานของเซอร์โวมอเตอร์
การทํางานเพียงตัว Servo Motor เพียงอย่างเดียวนั้นไม่สามารถทํางานได้ การที่จะให้ Servo Motor จะควบคุมลักษณะที่กล่าวมาข้างต้นนั้นต้องมีองค์ประกอบดังนี้
1.คอนโทรลเลอร์ (Controller)
หลักการทํางานหลักๆ หน้าที่ของ Controller คือ มีหน้าที่รับคําสั่งจากผู้ใช้งานว่าต้องการให้ Servo Motor นั้นเคลื่อนที่ด้วยความเร็วเท่าไหร่และระยะทาง ใกล้หรือไกลแค่ไหน หน้าที่ตรงจุดนี้จะเป็น Controller จะเป็นตัวกําหนดให้กับตัว Servo Moter

2. เซอร์โวไดรฟ์เวอร์ (Servo Driver)
หน้าที่ของ Servo Driver คือ จะรับสัญญาณมาจาก Controller และสั่งการให้กับตัว Servo Motor เคลื่อนที่ตามที่ Controller สั่งการมา แต่ทําไม Controller ไม่สั่งการควบคุมไปที่ Servo Motor โดยตรง เนื่องจาก Servo Driver จะเป็นตัวที่ปรับตั้งค่าของตัว Servo Motor ให้ทํางานตามรูปแบบของการควบคุมไม่ว่า จะเป็นการควบคุม ความเร็ว(Speed Control) , แรงบิด(Toucque) และ ตําแหน่ง(Position Control) ตัว Servo Driver จะเป็น ตัวกําหนดค่าตัวแปรหรือพารามิเตอร์ต่างๆ ให้กับตัว Servo Motor ให้ทํางานได้อย่างถูกต้องและแม่นยํา เพราะฉะนั้นเมื่อใช้ Servo Motor ก็จะต้องมี Servo Driver เสมอ

3. เซอร์โวมอเตอร์ (Servo Motor)
หน้าที่ของเซอร์โวมอเตอร์ คือ ขับเคลื่อนอุปกรณ์ของเครื่องจักรกลหรือระบบของการทํางานนั้นๆ ให้เป็นไปตามรูปแบบที่ ได้รับคําสั่งจากตัว Servo Driver พร้อมกับส่งสัญญาณป้อนกลับให้กับตัว Servo Driver ว่าตอนนี้ Servo Motor เคลื่อนที่ด้วย ความเร็วเท่าไหร่และระยะทางในการเคลื่อนที่เป็นระยะทางเท่าไหร่แล้ว ด้วยสัญญาณของตัว Encoder ที่อยู่ภายในตัว Servo Motor ทําให้การเคลื่อนที่ของ Servo Motor นั้นมีความแม่นยําสูง

China AC Servo (Step/Dir)
การตั้งค่าที่รวดเร็วและสกปรกสำหรับการควบคุมขั้นตอน / ทิศทางของเซอร์โวจีนทั่วไป
Fn009 = 230 (ปรับแรงดันไฟฟ้า)
Pn001 = ประเภทมอเตอร์ตามคู่มือ
Pn002 = 2 (โหมด step / dir)
Pn003 = 1 (เปิดใช้งานชุดมอเตอร์)
Pn098 = 20 (ตัวแบ่งการเข้ารหัสเกียร์อิเล็กทรอนิกส์)
เครื่องเข้ารหัสมี 2,500 PPR และประเมินด้วยการสร้างพื้นที่สี่เหลี่ยมจัตุรัสทำให้ 4 × 2500 = 10,000 PPR เพื่อให้ดีขึ้นเล็กน้อยคุณสามารถตั้งค่า Pn098 เป็น 20 10000/20 = 500PPR เพื่อให้คุณมีพัลส์ที่ค่อนข้างดีในการเคลื่อนที่ Pn098 … Pn0101 สามารถเลือกผ่านอินพุตดิจิตอลได้ไม่ว่าด้วยเหตุผลใดก็ตามฉันต้องถอดไดรเวอร์เซอร์โวออกจากเครือข่ายเพื่อที่จะนำ Pn102 มาใช้แม้ว่าไดรเวอร์นั้นจะไม่“ เปิดใช้งาน” ก็ตาม แต่ไม่เกี่ยวข้องในตัวอย่าง ... เราไม่ต้องการอินพุตแบบดิจิทัลเราไม่ต้องการเปลี่ยนกล่องเกียร์ดังนั้น GN1 และ GN2 จึงยังคง "ปิด" ไม่จำเป็นต้องมอบหมาย

เครื่องมือขนาดเล็กเพื่อคำนวณพารามิเตอร์
สำหรับการทดสอบเล่น Grbl ใน Arduino Uno มีไฟล์ * .hex ที่สามารถโหลดได้ด้วย XLoader ใช้ Grbl Panel เพื่อการสื่อสาร พารามิเตอร์นั้นสามารถถ่ายโอนผ่านคอนโซล MDI
ขั้นตอน / มม. ถึง 500 คุณจะได้รับตัวอย่างสำหรับ 1 มม. หนึ่งรอบเปิดมอเตอร์
$ 100 = 500.000
สามารถปรับความเร่งได้
$ 120 = 250.000
ในวิดีโอแรกมีการใช้ค่าที่ค่อนข้างอนุรักษ์นิยมมากกว่า

การเชื่อมต่อด้านหลังจะปรากฏในคู่มือ!
Pin 5V -> SudD Pin 3 & 4
Pin 2 -> SudD Pin 14 (ขั้นตอน)
Pin 5 -> SubD Pin 5 (Dir)
การเชื่อมต่อสายไฟหลัก:
L1 -> L1
N -> L2
L3 บนไดรเวอร์เซอร์โวยังคง
STEPPING MOTOR
ประเภทของ Stepping Motor
Strpping Motor (สเต็ปปิ้งมอเตอร์) หรือ Stepper Motor (สเต็ปเปอร์มอเตอร์) เป็นมอเตอร์ไฟฟ้าที่ขับเคลื่อนด้วยพัลส์ มีลักษณะการขับเคลื่อนโดยการหมุนรอบแกน 360 องศา ภายในนั้นจะประกอบไปด้วยขั้วแม่เหล็กบนสเตเตอร์ (Stator) ทำมาจากแผ่นเหล็กวงแหวน จะมีซี่ยื่นออกมาประกอบกันเป็นชั้นๆ โดยแต่ละซี่ที่ยื่นออกมานั้นจะมีขดลวด (คอยล์) พันอยู่ เมื่อมีกระแสผ่านคอยล์จะเกิดสนามแม่เหล็กไฟฟ้าขึ้น ซึ่งรูปแบบการพันขดลวดบน Stator จะมีด้วยกัน 2 แบบ คือ
แบบ Bipolar (ไบโพล่าร์) ในแต่ละขั้วแม่เหล็กบนสเตเตอร์จะมีการพันขดลวดหนึ่งขด บางครั้งอาจเรียกสเต็ปปิ้งมอเตอร์ประเภทนี้ว่า สเต็ปปิ้งมอเตอร์แบบ 2 เฟส

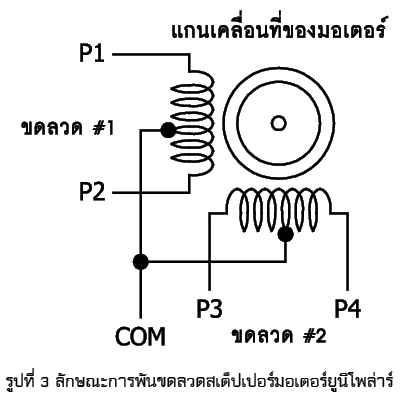
แบบ Unipolar (ยูนิโพล่าร์) จะมีการพันขดลวด 2 ขด บนสเตเตอร์ แต่ละขดจะแบ่งเป็น 2 เฟส รวมทั้งตัวมอเตอร์จะมีด้วยกัน 4 เฟส จะมีการต่อสายออกมาจากขดลวดแต่ละขดเพื่อจ่ายไฟเลี้ยง ทำให้สเต็ปปิ้งมอเตอร์แบบนี้มีทั้งแบบ 5 สายและ 6 สาย ถ้าเป็นแบบ 5 สาย จะเป็นการนำสายไฟเลี้ยงของขดลวดทั้งสองมาต่อรวมกันเป็นสายเดียว สเต็ปปิ้งมอเตอร์นี้ยังเป็นที่นิยมใช้กันแพร่หลายอีกด้วย
สต็ปมอเตอร์ สามารถทำงานได้โดยไม่ต้องการ Feedback เนื่องจากใช้แม่เหล็กที่ไม่แพง มีโครงสร้างที่เรียบง่ายและไม่ค่อยพบปัญหาการทำงานคู่กับกล่องเกียร์ เหมาะสำหรับงานที่ไม่ต้องใช้ความเร็วสูง ความคล่องตัวและความแม่นยำไม่จำเป็นมาก นอกจากนี้ยังมีราคาที่ถูกและขนาดที่เล็กกว่า ตัวอย่างกลุ่มงานที่เหมาะสม เช่น อุปกรณ์การแพทย์ เทคโนโลยีชีวภาพ การป้องกันและความปลอดภัย รวมถึงการผลิตเซมิคอนดักเตอร์
เซอร์โวมอเตอร์ เป็นทางเลือกของการทำงานที่มีความเร็ว ความคล่องตัว และความแม่นยำสูง ซึ่งเป็นสิ่งที่ต้องแลกมาด้วยราคาและความซับซ้อน มักใช้ในงานบรรจุภัณฑ์ งานที่ต้องการความละเอียดอ่อน หรือมีเงื่อนไขตรงกับความต้องการใช้งาน
การเลือกมอเตอร์ในการทำงานนั้นต้องพิจารณาถึงความต้องการ Torque ความเร็ว ความคล่องตัวในการใช้งาน น้ำหนักที่ต้องแบกรับ ต้นทุน และข้อจำกัดเรื่องขนาดของมอเตอร์ จึงไม่น่าแปลกใจเลยหากจะพบเห็นงานแสดงสินค้าเทคโนโลยีอุตสาหกรรมมักจะได้ยินศักยภาพมอเตอร์เซอร์โวอยู่บ่อยครั้ง ในขณะที่เสต็ปมอเตอร์นั้นแม้ไม่ถูกกล่าวถึงแต่กลับมีการใช้งานอย่างแพร่หลายโดยทั่วไป
อ้างอิง
ลิ้งรับชมวิธีการทดสอบ
จัดทำโดย
นายปิยะศักดิ์ ไตรเลิศ แผนกเมคคาทรอนิกส์ วิทยาลัยเทคนิคสมุทรสาคร

ความคิดเห็น
แสดงความคิดเห็น